Les Yakovlev à décollage vertical
V. Le développement du Yak-38
|
|
Les Yakovlev à décollage vertical
|
|
|
|
V. Le développement du Yak-38
|
|||
|
Translate :
|
Création/Mise à jour : 21/10/2001 | ||
|
|
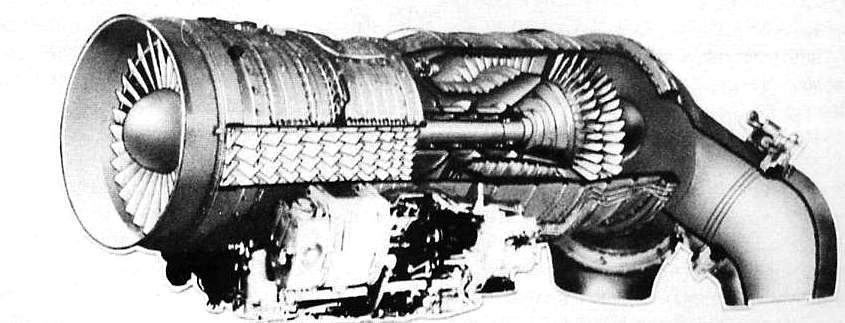
La configuration du nouvel appareil reprenait en partie celle du Yak-36 mais avec un nouveau fuselage. Ce fuselage était plus classique avec le cockpit disposé entre les deux entrées d'air, ce qui réduisait la traînée. Un changement plus fondamental tenait au fait que, avec deux moteurs de croisière R27, l'avion serait surmotorisé en vol normal, et le rayon d'action trop faible à cause de la consommation en carburant de deux R-27. En conséquence, Yakovlev décide d'utiliser un seul moteur de croisière/sustentation, et pour compenser le déficit de poussée pendant les vols stationnaires, d'installer des moteurs d'appoint derrière le cockpit.
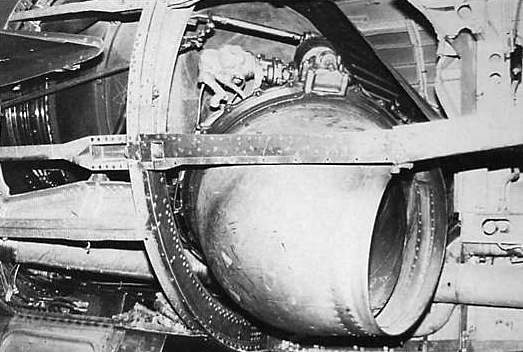
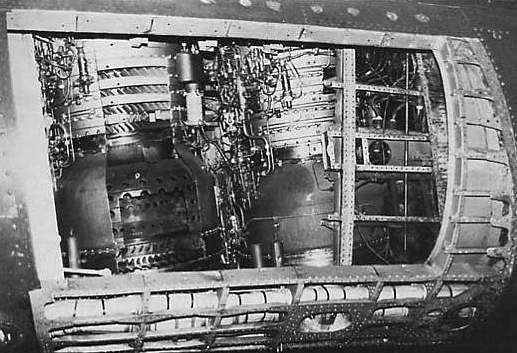
Naturellement, ces moteurs supplémentaires seront un poids mort en vol normal. Le moteur principal était une version améliorée du R27 développé par Y Gusev au sein de la firme Tumanskii. Ce moteur, le R27V-300, avait une poussée de 6000 kgp pour les prototypes et de 6800 kgp pour les moteurs de production. Le R27V-300 avait un diamètre de 1.012 m, une longueur de 3.706 m et une masse de 1350 kg. Les turboréacteurs de sustentation étaient installés immédiatement derrière l'habitacle entre les prises d'air du moteur de croisière.
De tels moteurs existaient en Grande-Bretagne depuis 1954 (voir les Rolls-Royce RB.108 du Short SC-1), mais aucun n'avait été développé en URSS. Une équipe menée par A Dynkin de l'OKB de Kolyesov conçu donc le RD36-35 spécifiquement pour le futur Yak-38. Le RD36-35 était un turboréacteur simple-flux avec un compresseur à six étages construit avec des matériaux légers (aluminium et fibre de verre) pour réduire le poids à 176 kg, et qui avait la particularité logique de fonctionner seulement à la pleine poussée (2350 kgp). Ces moteurs ont également été employés pour le même usage sur les appareils à décollage court MiG-23-01 et MiG-21 PD (deux moteurs chacun) et sur le Sukhoi T-58VD (trois moteurs).
Les RD36-35 étaient installés de sorte que la poussée résultante des deux moteurs de sustentation et du moteur principal passait par le centre de gravité de l'appareil. Pour cela ils étaient disposés en tandem avec un angle de 87° par rapport à l'horizontale et l'axe de poussée pouvait varier de 30 degrés grâce à des déflecteurs pour aider le pilote dans les transitions. En phase stationnaire, la panne d'un seul des trois moteurs déclenchait immédiatement le système d'éjection automatique SK-E. Le 10 janvier 1969, la construction d'un fuselage de test (porté sous un Tu-16) est lancé puis le 23 janvier, c'est la construction du prototype VM (Vertikalnyi Modifiuiro'vannyi) qui débute. La construction du fuselage d'essai DLL a pris seulement quatre mois, et le 28 mai 1969 il est envoyé au CIAM pour des essais au sol qui ont durés jusqu'à fin juin 1970. Le DLL est ensuite envoyé au LII où en juillet il est installé sur un pylône extensible sous le Tu-16 de test. Le rôle de ce banc d'essai volant était la mise au point de l'installation motrice du VM. |

|
Sources : Air & Cosmos n° 1354 du 25 Nov 1991 et n° 1392 du 21 Sept 1992) |
Les Yakovlev à décollage vertical |